Awesome Tech Post 第0期
每期 Awesome Tech Post 都会摘录推荐 5 篇优质技术博客,对这些文章的内容进行提炼总结。每期覆盖领域各不相同,可能从后端到可视化,从工程到算法等等,但每篇文章都会对领域内的某一问题进行深入分析或提出独到见解。欢迎大家私信推荐文章~
TL;DR #
本期内容:
如何对 Kubernetes Operator 进行分布式 Tracing
CloudKubernetes 多集群管理与联邦
Cloud强化学习中对无效动作的 mask
Reinforcement Learning一些深度学习中的采样方式和损失函数
Deep Learning如何在一个全新的领域开展学习
Soft Skill
0. How to Monitor Kubernetes Operators By Distributed-Tracing? #
原文链接:https://yue9944882.github.io/posts/how-to-monitor-kubernetes-operator-by-distributed-tracing/
在一个健全的系统中,应当对一条请求在完整生命周期中完成了哪些处理都进行监控追踪。随着现在大量的分布式应用和微服务的落地,一条请求可能跨越多个服务,甚至集群。对于这类请求的 tracing(追踪)问题就是 distributed tracing。Tracing 的整个流程可以被建模成一个树,其中每个节点是请求所经过的处理(根据监控的粒度,可以是一个服务,也可以是一个函数)。请求经过的每个处理被称作为 span。
异步问题 #
在微服务中,一条请求 R 到达微服务1后,一般通过 HTTP 或 RPC,进一步请求到微服务2进行处理,再到微服务N。最后,沿着这一条链,进行反向的返回 response。显然,这是一个同步的过程,我们可以很清晰的看出 R 的处理流程,R 的 tracing 结果就是这条转发树。
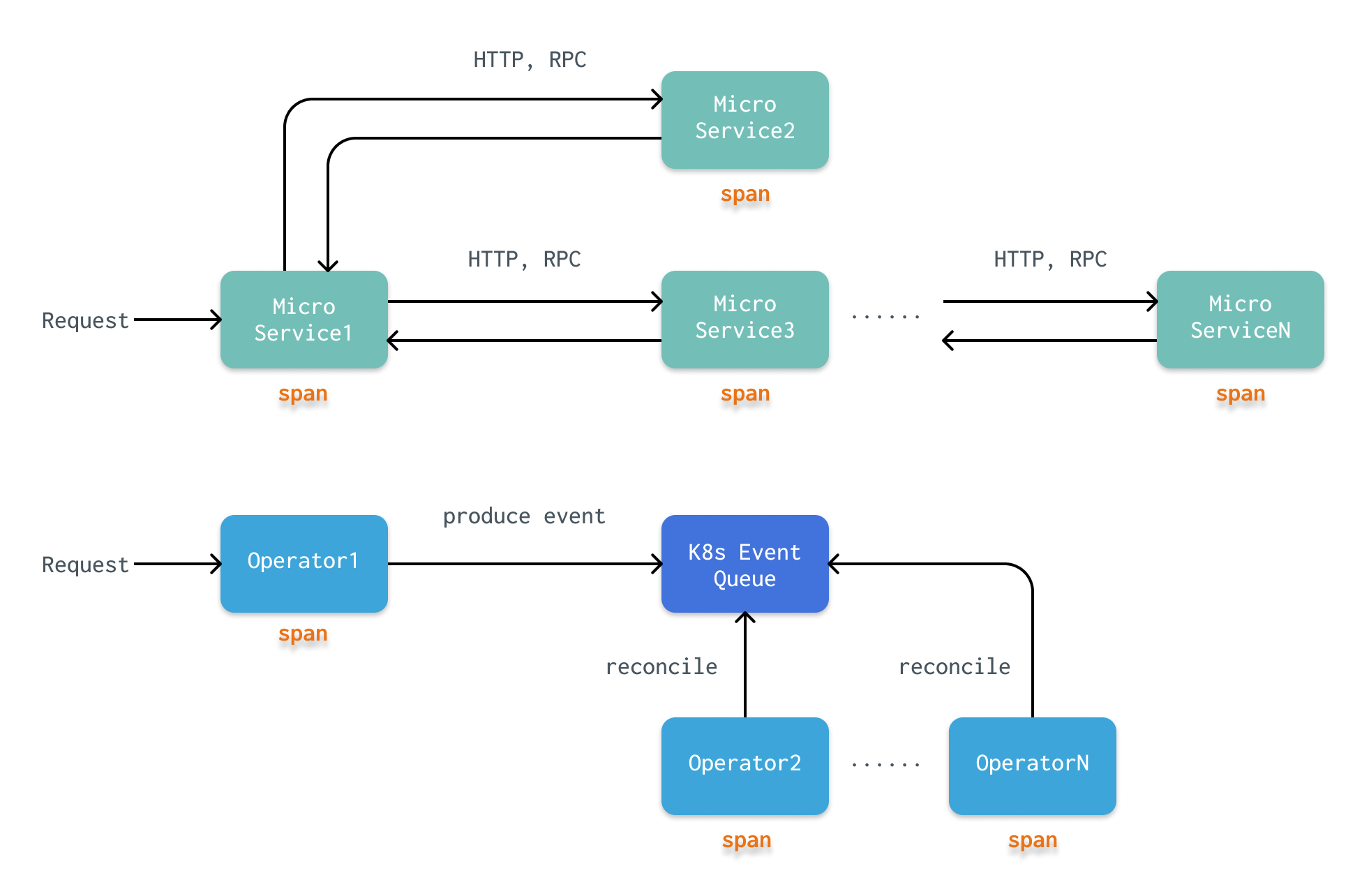
然而,与微服务不同,k8s operator 采用了完全不同的协作模式。K8s operator 不会与其他 operator 直接进行交互,而是生成一个 Event(例如,创建一个 Pod),k8s 会将这个 Event 放入到一个队列中。所有的 operator 都不断地轮询,从这个队列中获取符合自己过滤条件的 Event。显然,这是一个异步的过程。一异步,问题就麻烦了:
Event 的生成/消费不是线性的
Event 的生成和消费不是一一对应的。一方面,operator 可能将多个 Event 合并成一个任务,或者将一个 Event 分成多个任务。另一方面,一个任务由于重试策略可能会执行多次(在一个 operator 上产生多个 span)。
Event 循环
当一个 operator 根据 Event 改变 k8s 的资源后,又会产生一个新的 Event(k8s 中有资源被改变)。这就提出了一个问题,什么是这次 tracing 的结束?详细的讨论可以参考原文。
Operator 分类 #
每个 operator 都可能监听一个主要的 resource 和多个次要的 resource,因此,可以对 operator 进行如下的分类:
Type A:operator 只接收 Event。
Type B:operator 接收 Event,对 k8s 外的系统进行操作。
Type C:operator 只修改自己监听的资源。
Type D:operator 只修改不被自己监听的资源。
Type E:operator 修改任意的资源(Type C + Type D)。
对于 Type A 和 Type B 来说,请求到他们这里就结束了,所以他们是 leaf span。
对于 Type C 和 Type D 来说,由于不能确定有没有其他 operator 在监听同一个资源,所以无法判断其是否是 leaf span。对于 Type C 可以肯定的是,在 operator 完成最后一次 write 的时候,他仍会收到一个 Event(因为它所修改的资源正是自己监听的资源),并且会 drop 这个 Event(这个 Event 是由自身修改产生的,无意义)。因此,我们可以确定这个 operator 上多次 span 的 parent/child 关系。而对于 Type D,无法收到修改资源的最后一次 write 的 Event,所以,我们只能建立这个 operator 上多次 span 之间较弱的 link 关系。
对于 Type E 来说,这是最复杂但又是最常见的类型。Type E 其实是 Type C 和 Type D 的组合,所以对于 Type E 操作的每个资源,我们可以按照资源的类型,将 Type E 当前的 span 暂时转换成 Type C 或 Type D 来处理。
1. Kubernetes、集群联邦和资源分发 #
原文链接:https://draveness.me/kuberentes-federation/
Kubernetes 目前最多可以支持管理 5000 个节点,对于超过 5000 个节点的集群管理,就需要寻找其他方法对多个 K8s 集群进行管理。多集群其实不是一个新的概念,在很久之前,就在业界看到过 Mesos + K8s 的多集群管理方法。但是,多集群中的每个集群都相对独立,彼此之间没有联系,每个服务都是独立的运行在一个集群里的。而集群联邦则是在此基础上增加了两个重要的功能:跨集群的服务发现和跨集群的调度,使得一个多应用服务可以运行在多个集群上,进一步提升了服务的稳定性和可用性。
文章中,作者以两个比较出名的集群联邦项目为例,介绍了目前集群联邦的方案:
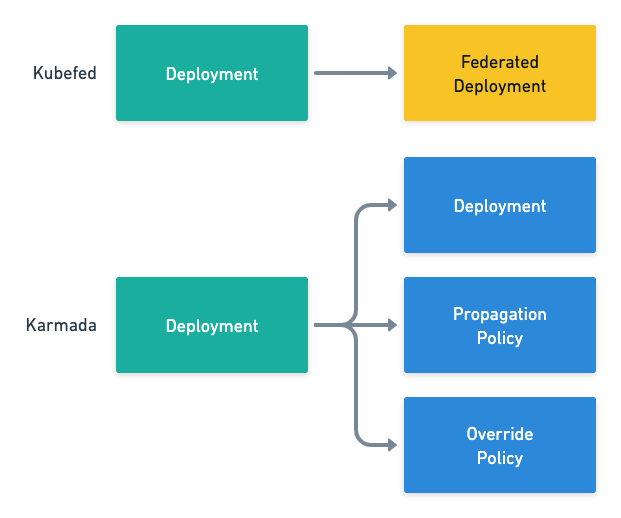
Kubefed 会为每个原生资源(e.g. Deployment)生成对应的联邦资源(e.g. FederatedDeployment)作为管理。联邦资源中会包含 Template(资源信息)、Placement(所需部署的集群)和 Overrides(同步资源到集群时,需要覆写的属性)三个部分。在分发到下游集群时,Kubefed 再根据联邦资源生成具体的原生资源。
Karmada 是 Kubefed 项目的延续,其中的概念也几乎全盘继承自 Kubefed。稍有不同的是,Karmada 保留了原生资源,并将 Kubefed 中联邦资源的 Placement 和 Override 抽离了出来,作为两个新的自定义资源 PropagationPolicy 和 OverriderPolicy。
对于任务调度来说,文章中提到了“因为上下文的不足,集群联邦不需要也没有办法保证调度的全局最优解,而提供跨集群的部署和故障转移就已经可以满足常见的需求了”。
2. A Closer Look at Invalid Action Masking in Policy Gradient Algorithms #
原文链接:https://costa.sh/blog-a-closer-look-at-invalid-action-masking-in-policy-gradient-algorithms.html
本篇文章是作者对所发表的同名论文 https://arxiv.org/abs/2006.14171 的介绍。对强化学习稍微有所了解的同学应该都知道 Policy Gradient,属于强化学习的两大分类之一。而 Invalid Action(无效动作)是强化学习中经常遇到的问题,例如,在训练模型走迷宫时,前方有障碍物,那么前进这一动作就是 invalid 的。那么,在训练时,需要对模型过滤掉这类动作,也就是 masking。而本篇文章就在尝试解释 Policy Gradient 算法中 invalid action masking 的工作原理。虽然 masking 在很多论文里都用到了,但都只是一句话带过(我之前读到的几篇甚至不会提到这些细节),没有对 masking 的原理进行深入探索。这也是文章作者的 motivition 之一。
简单来说,invalid action masking 就是在模型根据概率采样动作时,采用一个 mask 将 invalid action 的概率置为 0。文章中作者将 invalid action masking 建模成以下的函数 \(inv_s\):

\(l(s)\) 是状态 \(s\) 的 log 值。\(inv_s\) 在两种情况下都是可微的,在常数 \(M\) 时,梯度为0,因此,反向传播时不会更新模型有关 invalid action 相关的参数。
policy 在采样时的概率为:

文章中还通过量化的实验结果来验证 invalid action masking 的有效性,详情可以阅读原文。
3. 深度学习新的采样方式和损失函数–论文笔记 #
原文链接:https://zhuanlan.zhihu.com/p/27748177
本篇文章是对论文《Sampling matters in deep embedding learning》https://arxiv.org/pdf/1706.07567.pdf 的概述。论文主要解决的是 deep embedding learning 中的采样问题和损失函数问题。文章对论文的主要内容进行了很好的概述,这里就不再赘述了,就简单的罗列一些 insight 和文章中没解释清楚的部分:
Triplet loss 优于 Contrastive loss 的原因有两点:
constrative loss 假设所有样本都符合相同分布,而 triplet loss 没有这个假设。因此,可以适应各种空间形状,一定程度上能够抵御噪声的影响
triplet loss 优化的目标是正负样本之间的相对距离差,即正样本之间的距离小于正负样本之间的距离。而 constrative loss 优化的目标是绝对距离,即所有的正样本之间的距离也要尽可能小。这是没有必要的。
假设负样本均匀分布,我们也均匀随机采样。那么,采样的负样本 pairwise distance 符合如下的分布:

换句话说,在高维空间里,采样得到的负样本 pairwise distance 基本上都是大于 \(\sqrt{2}\) 的。论文针对这个问题,提出的方法是 distance weighted sampling。以距离概率值的倒数 \(q(d)^{-1}\) 作为样本采样的权重,这样在修正样本距离分布的 bias 的同时控制了 variance。
Triplet loss 采用的是一种 hard negtive mining 的方法,也就是正负样本的区分是 hard 的。负样本的梯度通过如下的公式计算:
梯度的方向取决于 \(h_{an}\) ,即 anchor 样本与负样本的向量差。那么,如果差向量的绝对值特别小,并且这个负样本是异常值,那对模型的梯度会造成很大的影响。

上图中展示了随着 pairwise distance 的增加,各种 loss 中正负样本是如何变化的。蓝色实线是正样本,绿色虚线是负样本。对于图b,\(D_{an}\) 越小,梯度值也越趋向于 0。根据 triplet loss 的计算公式,我们可以发现,这导致了模型趋向于这个点的梯度(正)会很大,但是远离这个点的梯度(负)很小。论文提出了 margin based loss 来解决这一问题,即图 d 中的 loss。在 \(D_{an}\) 很小的时候,仍然保证了负样本的梯度为一个常数,这有点类似 ReLU 的思想。
4. 如何在一个全新的领域展开学习 #
原文链接:https://ichn.xyz/blog/how-to-start-learning-in-a-new-area
学习计算机最重要的点在于关注能力的成长。而所有能力中最重要的,莫过于学习的能力,学习能力是培养其他能力的元能力。文章作者在接触了大量计算机细分领域后,总结出了几点特定的套路:
明确动机
要有明确且实际的需求。一是可以解决兴趣使然导致的选择困难,二是在学习的过程中,感受到切实的正反馈。
背景调查
一旦明确了学习的动机和目标,应该更系统性地、刻意地对这个领域展开背景调查。
知道即将学习的知识可以解决什么样的问题,这种解决手段和其他方式相比的优劣,这个领域和其他领域、特别是自己已经熟悉的领域的关系是怎样的,这个领域的发展历史和发展脉络是怎样的,有哪些独特且重要的概念?
背景调查获取的信息通常是宏观或者碎片化的,这并不是真正的学习。但这个过程可以提高你对这个领域的熟悉程度,在你的话语体系和思考方式中加入这个领域的成分,并提高你对这个领域的品味与认知。
资源汇集与整理
了解这个领域有哪些重要的资料,更重要的是会拥有判断这个方向的学习资料的优劣的能力。
制定计划,然后无情地执行
如果执行学习计划中会有枯燥的感觉,就需要回顾自己的动机、目标,并稍稍跳出来重新审视一下学习计划。
如果确认学习路径的正确性,就应该专注,而不是继续在这个领域中漫无目的的探索,这样才能进入深水区。